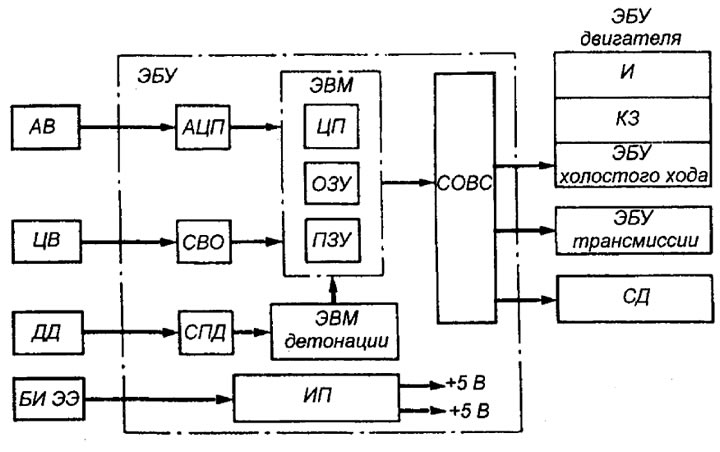
Рис. 13. Схема системы управления автомобилем с бензиновым (двигателем): БИ ЭЭ - бортовой источник электроэнергии; ДД - датчик детонации; ЦВ -цифровые входы; CBO - схема входной обработки (схема обработки входных сигналов); ОЗУ - оперативное запоминающее устройство; АВ - аналоговые входы; АЦП - аналого-цифровой преобразователь; ЭВМ - 8-разрядная однокристальная ЭВМ; ЦП - центральный процессор; СОВС - схемы обработки выходных сигналов; И - инжектор; КЗ - коммутатор зажигания; СД - система информации контроля диагностики; ПЗУ - постоянное запоминающее устройство; ЭВМ детонации - 4-разрядная однокристальная ЭВМ для выявления детонации; СПД - схема преобразования сигнала детонации; ИП - источник питания
МикроЭВМ обычно выполняется на одном кристалле, содержащем основные функциональные элементы: ПЗУ, ЦП, ОЗУ и др. Эти ЭВМ классифицируются на ЭВМ общего применения и заказные. Поскольку от датчиков могут поступать электрические сигналы, которые в микроЭВМ вводить нельзя, ЭВМ общего применения для автомобиля малопригодно. Были разработаны несколько типов специальных однокристальных микроЭВМ с необходимыми входными и выходными функциями, предназначенные для применения в системах управления автомобилем.
В АЦП поступают аналоговые сигналы от датчиков расхода воздуха, напряжения бортовой сети, температуры охлаждающей жидкости, температуры поступающего в двигатель воздуха, угла открытия дроссельной заслонки и др. Эти сигналы преобразуются в цифровые следующим образом.
Возьмем в качестве примера аналоговый сигнал датчика расхода воздуха. Сигнал в виде напряжения потенциометра и опорное напряжение подаются на АЦП. Этот сигнал является основным при управлении впрыском топлива и необходимы высокие разрешающая способность и точность его измерения. Поэтому для обработки используется, например, 11-разрядный АЦП. Продолжительность преобразования должна быть малой (порядка 4 мс), чтобы успевать за быстрыми изменениями входного сигнала.
Цифровые сигналы, поступающие с датчиков угла поворота коленчатого вала, частоты вращения коленчатого вала на холостом ходу, системы зажигания, кислорода, скорости автомобиля, включения кондиционера, стартера и нейтральной передачи, давления масла, стоп-сигнала, ключа зажигания, поступают на СВО (см. рис. 13).
Дело в том, что эти сигналы нельзя подавать на вход микроЭВМ, так как она работает от стабилизированного источника напряжения питания +5 В, а сигналы датчиков имеют различные значения напряжения, превышающие допустимое (+12 В), или переменной полярности, которые в ЭВМ вводить нельзя. Эти сигналы, пройдя схемы входной обработки, преобразуются в сигналы, которые могут быть введены в микроЭВМ (рис. 14).
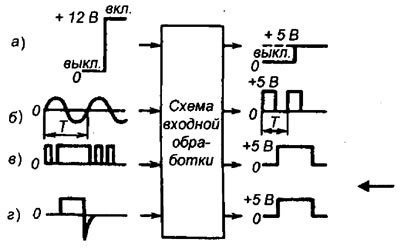
Рис. 14. Формы входных и выходных сигналов: а - превышающего напряжения; б - переменной полярности; в - содержащих помехи; г - содержащих пиковые напряжения
Сигнал датчика детонации обрабатывается 4-разрядной микроЭВМ и затем подается в 8-разрядную микроЭВМ. На основе входных сигналов эта микроЭВМ рассчитывает для данного состояния двигателя оптимальные значения количества впрыскиваемого топлива, угол опережения зажигания, частоты вращения коленчатого вала на холостом ходу и другие параметры. Затем управляющие сигналы, пройдя СОВС, воздействуют на форсунки, коммутацию зажигания, клапан управления частотой холостого хода и т.д. Последовательность работы такой ЭВМ показана на рис. 15.

Рис. 15. Последовательность работы блоков микроЭВМ
Выходные сигналы времени впрыска топлива и угла опережения зажигания выдаются в оптимальной временной последовательности за счет обработки, при которой приоритет отдается зажиганию, а не впрыску. Если во время расчета коррекции впрыска необходимо выдать выходной сигнал об угле опережения зажигания, то расчет коррекции впрыска останавливается, производится расчет и выдается сигнал об изменении угла опережения зажигания. Затем продолжается расчет коррекции впрыска.
Выходные сигналы микроЭВМ в большинстве случаев не могут быть использованы для привода исполнительных механизмов, так как напряжение на выходе микроЭВМ равно 5 В, а номинальное напряжение исполнительных механизмов - форсунок, транзисторных коммутаторов, шаговых электродвигателей - 14 В. Поэтому между микроЭВМ и исполнительными механизмами устанавливается электронный усилитель.