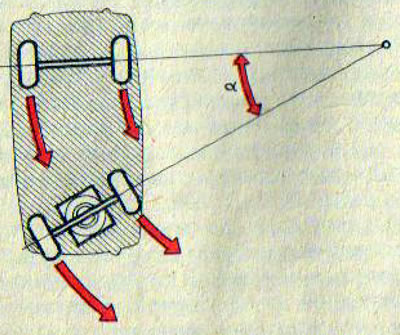
Рис. 74. Схема поворота автомобиля
Как видно из рис. 75, для поворота автомобиля левое и правое колеса необходимо повернуть на разные углы. Одновременный поворот управляемых колес на разные углы обеспечивается так называемой рулевой трапецией, сторонами которой являются балка пер его моста, поперечная тяга и рычаги поперечной тяги Поворотные цапфы закрепляются на концах балки переднего моста при помощи вставляемых в отверстия балки и цапф шкворней и поворачиваются вокруг них поворотными рычагами, соединенными поперечной тягой (рис. 76). На левой поворотной цапфе закреплен второй поворотный рычаг, соединенный с продольной рулевой тягой. Если потянуть за эту тягу назад, то оба колеса повернутся вправо, если толкнуть вперед налево. Все рассмотренные детали относят к так называемому рулевому приводу.

Рис. 75. Схема поворота управляемых колес
Для поворота колес на автомобиле устанавливают рулевой механизм, состоящий из корпуса и червяка, который постоянно находится в зацеплении с зубчатым секретом (или роликом). На одном валу с зубчатым секретом закреплена сошка. Если повернуть вал, на котором закреплен червяк, то он, как бы ввинчиваясь в зубья сектора (или гребни ролика), заставит сектор, а вместе с ним и сошку повернуться на некоторый угол.
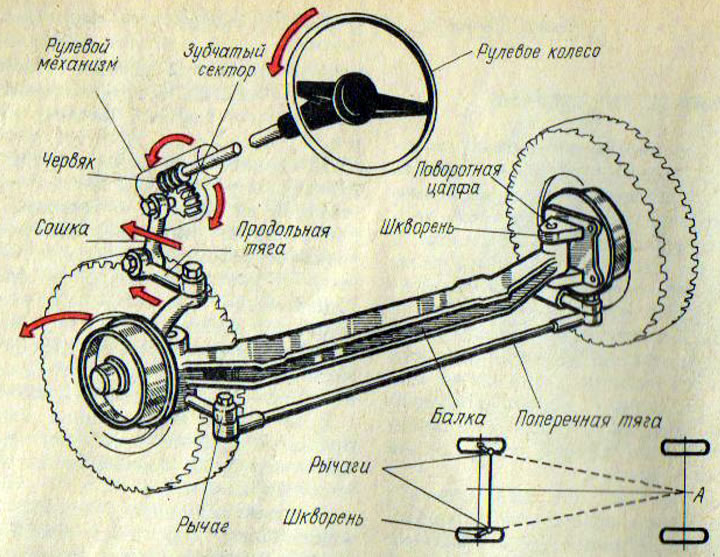
Рис. 76. Рулевое управление
Если теперь конец сошки соединить с продольной тягой, а на валу червяка закрепить рулевое колесо, то получится рулевое управление.
Рулевой механизм (рис. 77) — это замедляющая передача, преобразующая вращение вала рулевого колеса во вращение вала сошки. Рулевой механизм увеличивает усилие, приложенное к рулевому колесу водителя, и таким образом облегчает его труд.
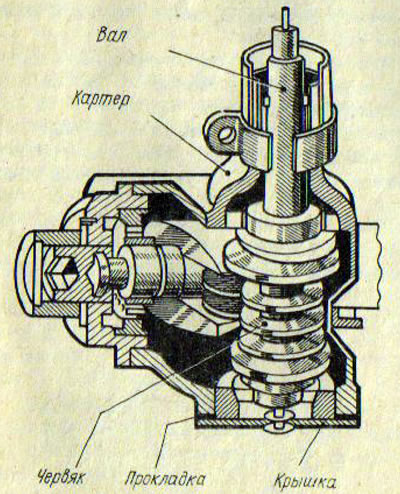
Рис. 77. Рулевой механизм
Передаточное число в червячных передачах всегда очень большое (у легковых автомобилей обычно составляет 16—19). Поэтому для поворота управляемых колес на небольшой угол рулевое колесо необходимо повернуть на значительно больший угол.
Итак, рулевое управление — это совокупность механизмов автомобиля, обеспечивающих его движение по заданному водителем направлению. Оно состоит из рулевого механизма, передающего усилия от водителя к рулевому приводу, и рулевого привода, передающего усилия от рулевого механизма к управляемым колесам автомобиля.
В конструкциях рулевых механизмов современных легковых автомобилей для уменьшения трения вместо зубчатого сектора используют ролик, вращающийся на подшипниках качения При повороте рулевого колеса ролик катится по поверхности червяка и через рулевой привод поворачивает передние колеса так же, как мы рассмотрели выше Только здесь для облегчения управления трение скольжения заменено трением качении. Рулевой вал и вал сошки также устанавливают на подшипниках качения.
Мы рассмотрели схему рулевого управления при зависимой подвеске колес.
В современных легковых автомобилях получила распространение бесшкворневая независимая подвеска. В ней вместо шкворня использованы два шаровых пальца, закрепленных в цапфе и установленных шаровыми головками в нижнем и верхнем рычагах (рис. 78).
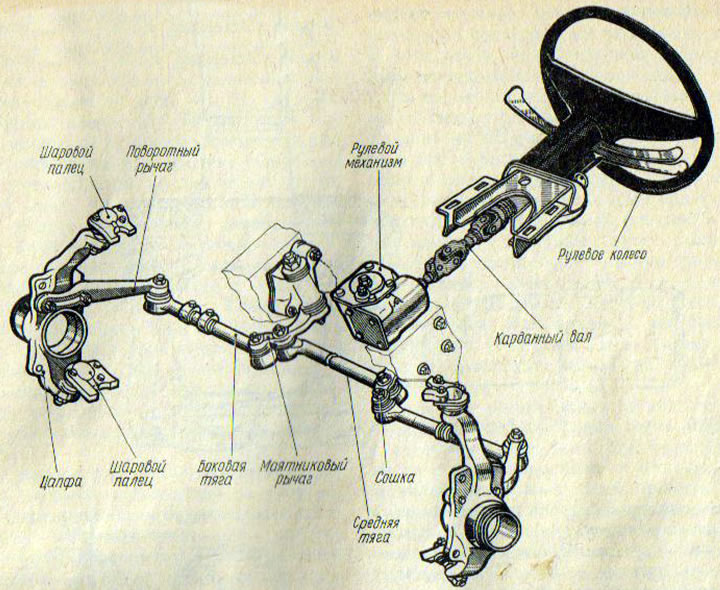
Рис. 78. Рулевое управление колес с независимой подвеской
Независимая подвеска колес требует внесения в конструкцию рулевого привода некоторых изменений по сравнению с рассмотренной нами схемой. Связано это с тем, что при подъеме одного из колес (например, при наезде на препятствие) поперечная тяга воздействует на другое колесо. Поэтому поперечная тяга сделана разъемной и поддерживается маятниковым рычагом, продольная убрана, а сошка качается в поперечной плоскости. Таким образом, поворотные рычаги цапф соединены через боковые тяги с маятниковым рычагом и сошкой, связанными между собой средней тягой.
Рулевые тяги и рычаги соединены при помощи шаровых пальцев. Они конической и резьбовой частью закрепляются в рычаге, а шаровой головкой входят через радиальное отверстие в наконечник тяги, где закрепляются при помощи вкладышей (рис. 79). Вкладыши сжимаются пружиной и создают постоянный натяг, обеспечивая надежность крепления пальца.
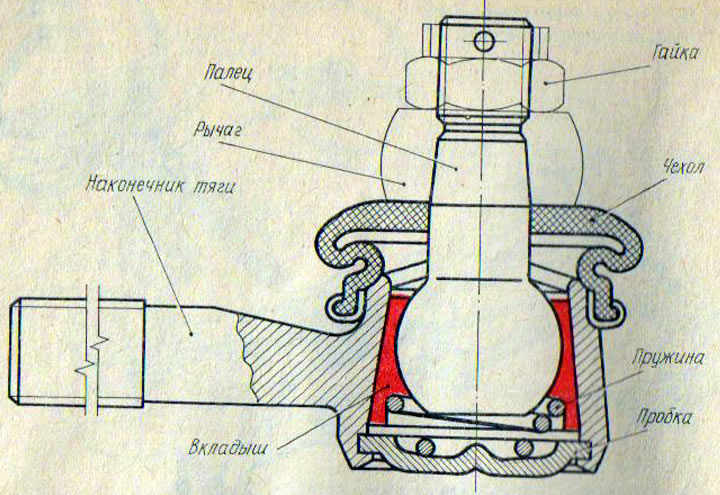
Рис. 79. Шаровой палец
Стабилизация управляемых колес
Важнейшее качество современного автомобиля — его быстроходность. Однако увеличение скорости движения возможно при обеспечении полной безопасности. Это зависит от многих факторов и, в частности, от того, как реагирует автомобиль на случайные толчки со стороны дороги, как сильно утомляется водитель, управляя автомобилем, как автомобиль «держит» дорогу, т. е. насколько он устойчив при движении. Таким образом,современный автомобиль должен быть достаточно устойчив (не реагировать на случайные толчки) и в то же время при небольшом усилии водителя легко и быстро изменять направление движения.
Одним из важнейших факторов, влияющих на устойчивость автомобиля, является стабилизация управляемых колес. Это означает, что управляемые колеса должны сами сохранять направление прямолинейного движения автомобиля, даже если водитель и не будет держать рулевое колесо, а после поворота автоматически возвращаться в прежнее положение стоит только водителю отпустить рулевое колесо. Необходимость стабилизации объясняется тем, что во время движения автомобиля управляемые колеса с плохой стабилизацией, получая толчки от дороги, отклоняются в сторону. Водитель вынужден возвращать их в среднее положение (направление прямолинейного движения), но так как это положение строю не зафиксировано, ом «переводит» через это среднее положение и тут же вынужден снова поворачивать рулевое колесо. Это «рыскание» продолжается на протяжении всей поездки. Водитель утомляется, соединения рулевого привода интенсивно изнашиваются, а сам автомобиль неустойчиво ведет себя на дороге, причем чем выше скорость, тем больше неустойчивость. Особенно важна стабилизация при повороте автомобиля, так как она помогает водителю быстро и легко выйти из поворота.
Для понятия явления стабилизации посмотрим на переднее колесо велосипеда (рис. 80). Его вилка расположена не вертикально, а под некоторым углом к дороге. Если мысленно продлить ось поворота вилки до пересечения с дорогой, то обнаружим, что точка пересечения оказалась перед точкой опоры колеса.
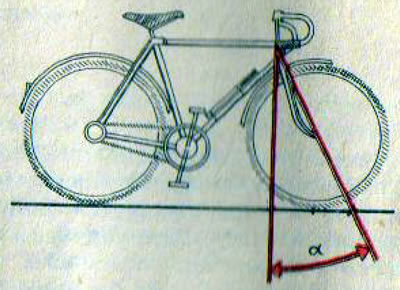
Рис. 80. Схема стабилизации колеса велосипеда
Если, сидя на велосипеде, повернуть руль в сторону и отпустить, то он сам станет поворачиваться в исходное положение. Чем больше наклонена вилка, тем сильнее так называемая реакция дороги и тем сильнее поворачивается колесо. Именно этим объясняется возможность езды велосипедиста «без рук». На этом же принципе добиваются стабилизации управляемых колес у автомобиля.
Углы установки передних колес
Важнейшими являются углы продольного и поперечного наклона шкворня, развала и схождения колес Рассмотрим эти углы и разберемся, какое шачение они имеют в стабилизации колес.
Продольный наклон шкворня это наклон его оси к вертикали в продольной плоскости автомобиля (рис. 81, а). Его наклон считается положительным, если верхний конец шкворня наклонен к задней части автомобиля, т.е. аналогично наклону вилки велосипед. Кроме продольного шкворень имеет поперечный наклон, т.е. наклон верхнего его конца в поперечной плоскости от вертикали к центру автомобиля.
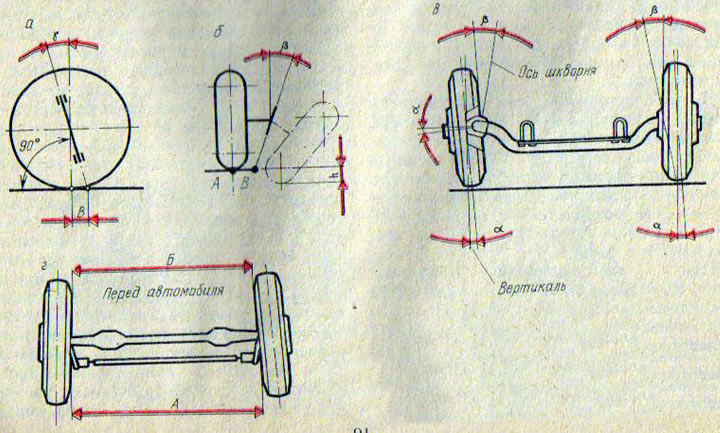
Рис. 81. Углы установки колес: а - наклона шкворня в продольной плоскости; б - наклона шкворня в поперечном плоскости; в - развала колес; г - схождение колес
При поперечном наклоне шкворня уменьшается до минимума расстояние от средней точки А опоры колеса на дорогу до точки В пересечения продольной оси шкворня с дорогой (рис. 81,6). За счет уменьшения плеча АВ уменьшаются нагрузки на детали рулевого управления при наезде колеса на препятствие. Одновременно уменьшаются усилия водителя на поворот колес. Заметим, что если поворачивать колесо относительно шкворня, то колесо опускается относительно дороги, а так как это невозможно, то поднимается весь передний мост, а вместе с ним и вся передняя часть автомобиля. Таким образом, под действием массы автомобиля колеса будут поворачиваться в среднее положение, т. е. наблюдается явление стабилизации управляемых колес. В зависимости от модели автомобиля угол продольного наклона шкворня обычно составляет 2—6°.
Если колеса расположить вертикально, то при нагрузке автомобиля за счет зазоров в соединениях и подшипниках колеса примут наклонное положение, которое нарушит правильный процесс их качения. Чтобы этого не произошло, колеса устанавливают под некоторыми углами, получившими названия углов развала колес. Угол развала достигается наклоном оси поворотной цапфы (рис. 81. в). Он компенсирует влияние зазоров в подшипниках и втулках шкворней на положение колес. В результате под нагрузкой колеса принимают вертикальное положение.
Во время движения автомобиля по прямой силы сопротивления качению, действующие. на управляемые колеса, стремятся развернуть их наружу. Поэтому, чтобы колеса катились по прямой без скольжения, их также устанавливают под углом к вертикальной продольной плоскости, т. е. применяют так называемое схождение колес. Схождение колес обычно оценивают как разность расстояний А и Б между краями ободьев колес впереди и сзади на уровне оси. Как правило, эта разность составляет 0—12 мм, что соответствует углам поворота колес не более 1° (рис. 81, г).
Углы установки колес в значительной степени влияют на безопасность движения и величину износа шин. Конструкция подвески управляемых колес у легковых автомобилей позволяет регулировать углы установки колес. У грузовых автомобилей величина схождения колес регулируется резьбовыми наконечниками поперечной тяги.
Понятно, что чем тяжелее автомобиль, тем большее усилие необходимо приложить водителю к рулевому колесу для поворота управляемых колес. Для облегчения поворота колес, как мы уже отмечали, увеличивают передаточное число рулевого механизма, однако увеличивать его безгранично нельзя’, да и нет необходимости. Для облегчения управления используют усилители рулевого приводу. Они значительно повышают безопасность движения, так как позволяют сохранить управляемость автомобиля даже в критических ситуациях, например, при резком разрыве («выстреле») одного из колес, смягчают толчки на рулевое управление от неровностей дороги.
Обычно усилители бывают гидравлические и пневматические. Усилители конструктивно могут быть выполнены отдельно от рулевого механизма или совмещены с ним. Рассмотрим гидроусилитель, объединенный в один агрегат с рулевым механизмом. Такое рулевое управление установлено на автомобиле ЗИЛ-130. В его картере находятся: винт с гайкой (рис. 82, а), жестко связанной с зубчатой рейкой, изготовленной заодно с поршнем, гидроусилитель и зубчатый сектор, выполненный вместе с валом рулевой сошки. Для уменьшения трения в резьбе между винтом и гайкой засыпаны так называемые циркулирующие шарики. Поршень-рейка перемещается в картере-цилиндре. Плотность между ними обеспечена чугунными кольцами.
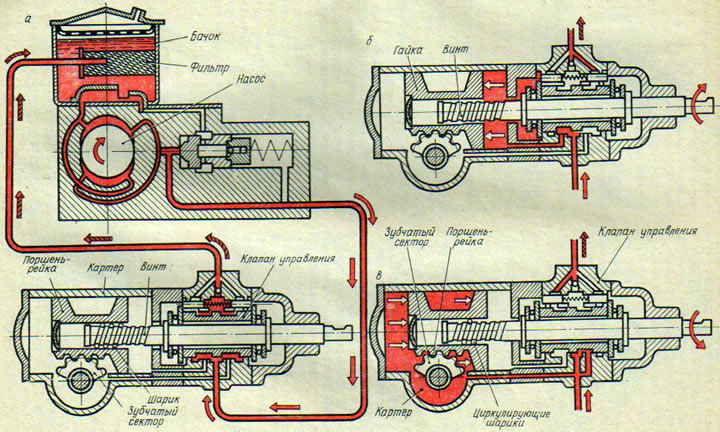
Рис. 82. Усилитель рулевого управления
При вращении рулевого колеса винт перемещает гайку, а вместе с ней и поршень-рейку вдоль картера-цилиндра. Зубья рейки поворачивают сектор, а вместе с ним вал с сошкой и управляемые колеса автомобиля.
Для облегчения поворота колес на автомобиле установлен насос гидроусилителя, приводимый в действие от шкива коленчатого вала двигателя. Насос соединен с клапаном управления шлангом высокого давления, по которому масло подается от насоса к гидроусилителю и шлангом низкого давления, по которому масло возвращается в бачок.
При прямолинейном движении (рис. 82,а) клапан управления находится а среднем положении, и масло из насоса перекачивается в бачок. При повороте рулевого колеса вправо (рис. 82, б) клапан перемещается влево и открывает доступ маслу в пространство справа поршня. Давление масла до 6,5—7 МПа (65—70 кгс/см²) на поршень помогает водителю поворачивать колеса автомобиля. При повороте рулевого колеса влево (рис. 82, а) клапан перемещается вправо и открывает доступ маслу в пространство слева поршня. В результате облегчается поворот рулевого колеса влево.