Компоненти системи керування двигуном у руховому відсіку
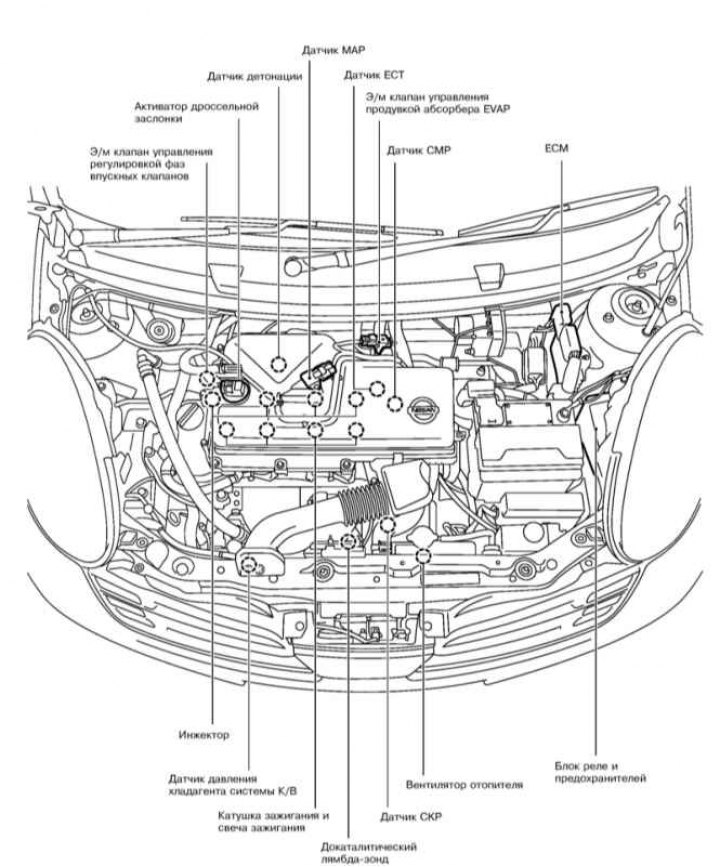
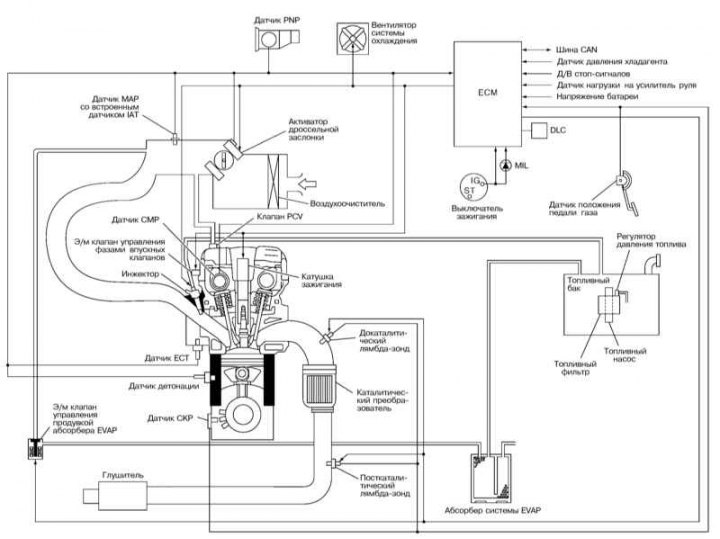
Схема функціонування системи керування двигуном
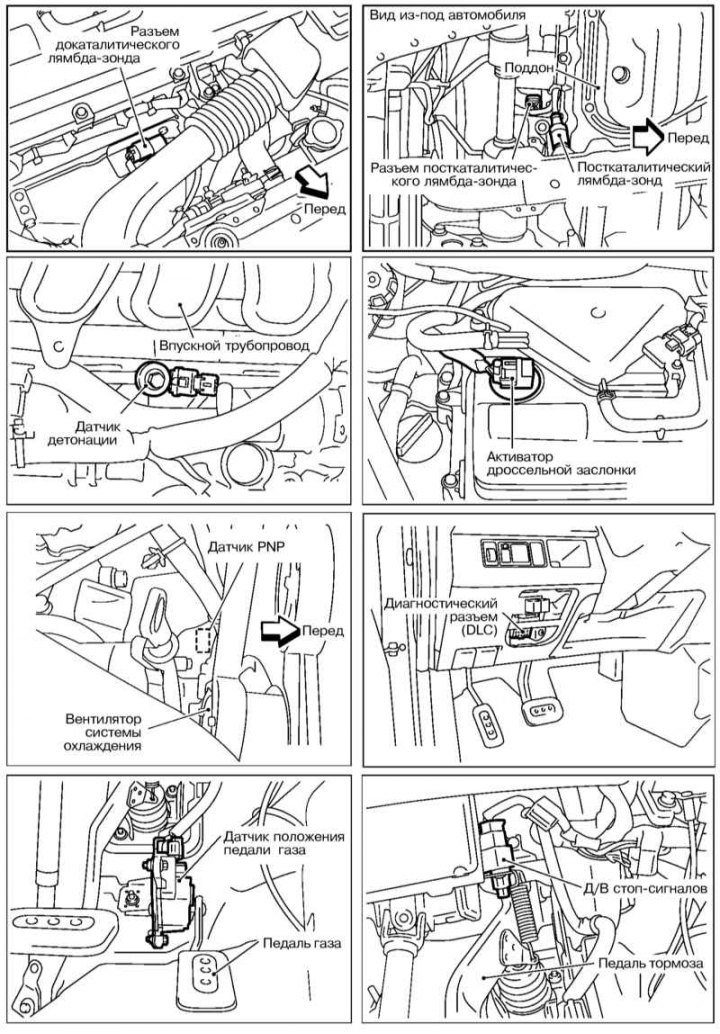
Розташування компонентів системи керування двигуном, частина 1
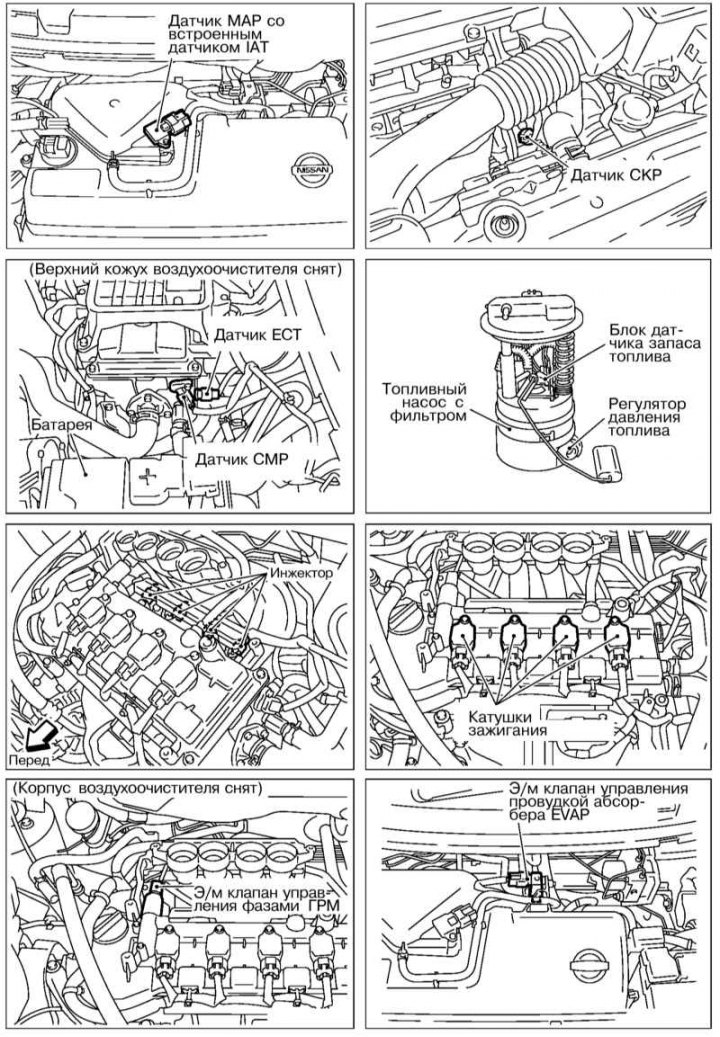
Розташування компонентів системи керування двигуном, частина 2
Паливо засмоктується з паливного бака електричним паливним насосом і подається через паливний фільтр до розподільної паливної магістралі. Регулятор тиску забезпечує підтримку тиску в паливній системі на рівні 3.5 атм.
На двигунах через електрокеровані інжектори паливо імпульсно впорскується у впускні порти розташовані безпосередньо перед впускними клапанами двигуна. Блок управління двигуном (ECM) визначає оптимальні моменти запалювання та впорскування, а також кількість палива, що впорскується, узгоджено з іншими системами автомобіля. Висока напруга для іскроутворення сигналу ECM генерується котушками запалювання, встановленими над свічками запалювання.
Датчик положення колінчастого валу (CKP) дає блоку управління інформацію про кількість обертів колінчастого валу і точне його положення. Ця інформація використовується для визначення моментів упорскування та запалювання. Датчик CKP розташований на задній стороні двигуна та працює на основі ефекту Холла, скануючи зубці ротора, встановленого на колінчастому валу.
Датчик положення розподільчого валу (CMP) розташований в задньому торці головки циліндрів і працює аналогічно датчику CKP, скануючи зубчастий ротор на кінці впускного розподільчого валу. Датчик CMP разом із датчиком CKP використовується визначення ВМТ поршня першого циліндра, динамічного регулювання фаз ГРМ (за допомогою е/м клапана і регулятора фаз впускних клапанів), селективного регулювання детонації в циліндрах і визначення послідовності упорскування.
Повітря, необхідне освіти робочої суміші, засмоктується двигуном через повітряний фільтр і надходить через дросельну заслінку і впускний трубопровід до впускних клапанів. Кількість повітря, що всмоктується, регулюється дросельною заслінкою з е/приводом, керованим по сигналах від датчика положення педалі газу. Завдяки електронному управлінню масова витрата повітря у впускному трубопроводі може встановлюватися незалежно від положення педалі газу, і на холостих обертах дросельна заслінка відкривається на кут, необхідний для встановлення необхідної частоти обертання колінчастого валу. Об'єм повітря, що всмоктується, визначається датчиком тиску у впускному трубопроводі (MAP) з вбудованим датчиком температури повітря, що всмоктується (IAT).
Датчик детонації (KS) вкручений збоку в блок циліндрів і запобігає виникненню ударного згоряння палива. Завдяки цьому момент запалення утримується на межі детонації, що забезпечує найкраще використання енергії палива і тим самим зниження витрати палива.
Інформація від інших датчиків та керуючі напруги, що надходять до виконавчих органів, забезпечують оптимальну роботу двигуна у будь-якій ситуації. Якщо деякі датчики виходять з ладу, блок управління перемикається в режим аварійної програми, щоб унеможливити можливе пошкодження двигуна та забезпечити подальший рух автомобіля. В аварійному режимі інжектори спрацьовують одночасно 2 рази за робочий цикл.
Система вентиляції паливного бака складається з абсорбера парів бензину та е/м клапана. В абсорбер концентруються паливні пари, що утворюються в баку в результаті нагрівання палива. Під час роботи двигуна паливні пари прокачуються з абсорбера та беруть участь в утворенні робочої суміші.
Зниження токсичності ОГ здійснюється за допомогою 3-функціонального каталітичного перетворювача та лямбда-зондів (до та після каталітичного перетворювача).
Також для усунення витоків вуглеводнів, що не згоріли, в атмосферу застосована система вентиляції картерних газів (PCV). Гази та пари олії, що утворюються в картері, потрапляють у впускний трубопровід (за рахунок різниці тиску – у картері воно вище) і згоряють у циліндрах разом із паливом.
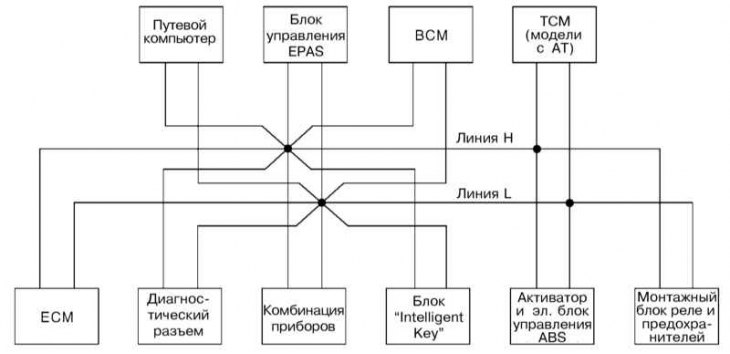
Для того, щоб численні електронні блоки управління могли обмінюватися даними, ці блоки об'єднані високошвидкісною шиною передачі даних CAN. Шина CAN складається з двох ліній (H та L), що дозволяє скоротити кількість електропроводки. Кожен блок управління може одночасно передавати та приймати дані, однак кожен конкретний блок зчитує з шини CAN лише необхідні йому дані.
Схема організації шини CAN